

Sitemize üye olarak beğendiğiniz içerikleri favorilerinize ekleyebilir, kendi ürettiğiniz ya da internet üzerinde beğendiğiniz içerikleri sitemizin ziyaretçilerine içerik gönder seçeneği ile sunabilirsiniz.
Sitemize üye olarak beğendiğiniz içerikleri favorilerinize ekleyebilir, kendi ürettiğiniz ya da internet üzerinde beğendiğiniz içerikleri sitemizin ziyaretçilerine içerik gönder seçeneği ile sunabilirsiniz.
Üyelerimize Özel Tüm Opsiyonlardan Kayıt Olarak Faydalanabilirsiniz

Sıradaki içerik:
Multimetre Çeşitleri ve Uygulamaları

-
 0
0Mutlu
-
0
Eğlenmiş
-
0
Şaşırmış
-
0
Kızgın
-
Üzgün





Servo Motor – Çalışması, Avantajları ve Dezavantajları
168 okunma
—
11 Mayıs 2023 18:28



Servo, bir sistemin performansını düzeltmek için kullanılan geri besleme kontrolünü algılayan bir hata anlamına gelir. Ayrıca, genellikle özellikle servo motorlarla kullanım için tasarlanmış özel bir modül olan genel olarak gelişmiş bir kontrolör gerektirir. Servo motorlar, açısal pozisyonun hassas kontrolünü sağlayan DC motorlardır. Dişliler tarafından hızı yavaş yavaş düşürülen DC motorlardır. Servo motorlar genellikle 90° ila 180° arasında bir devir kesimine sahiptir. Birkaç servo motor da 360° veya daha fazla bir devir kesme değerine sahiptir. Ancak servo motorlar sürekli dönmezler. Dönmeleri sabit açılar arasında sınırlıdır.
Servo motor dört şeyden oluşan bir gruptur: normal bir DC motor, bir vites küçültme ünitesi, bir konum algılama cihazı ve bir kontrol devresi. DC motor, çoğunlukla bir potansiyometre olan bir konum sensörüne geri bildirim sağlayan bir dişli mekanizmasına bağlıdır. Dişli kutusundan motorun çıkışı, servo kanal aracılığıyla servo koluna iletilir. Standart servo motorlar için dişli normalde plastikten yapılırken, yüksek güçlü servolar için dişli metalden yapılır.
Bir servo motor üç kablodan oluşur – toprağa bağlı siyah kablo, kontrol ünitesine bağlı beyaz/sarı kablo ve güç kaynağına bağlı kırmızı kablo.
Servo motorun işlevi, servo milin istenen çıkış konumunu temsil eden bir kontrol sinyali almak ve mili bu konuma dönene kadar DC motoruna güç vermektir.
Şaftın dönme pozisyonunu belirlemek için konum algılama cihazını kullanır, böylece şaftı belirtilen konuma hareket ettirmek için motorun hangi yöne dönmesi gerektiğini bilir. Şaft genellikle bir DC motora benzer şekilde serbestçe dönmez, bunun yerine sadece 200 derece dönebilir.

Servo Motor
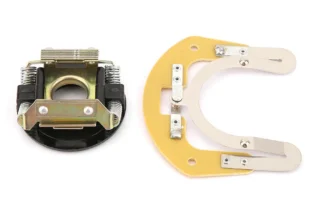
Rotorun konumundan, torku verimli bir şekilde oluşturmak için dönen bir manyetik alan oluşturulur. Akım, dönen bir manyetik alan oluşturmak için sargıda akar. Şaft motor çıkış gücünü iletir. Yük, aktarma mekanizması aracılığıyla sürülür. Yüksek işlevli nadir toprak veya başka bir kalıcı mıknatıs, şaftın dışında konumlandırılır. Optik kodlayıcı her zaman dönüş sayısını ve milin konumunu izler.
Servo Motorun Çalışması
Servo Motor, DC Motor, Dişli sistemi, konum sensörü ve kontrol devresinden oluşur. DC motorlar bir bataryadan güç alır ve yüksek hızda ve düşük torkta çalışır . DC motorlara bağlı Dişli ve mil tertibatı bu hızı yeterli hıza ve daha yüksek torka düşürür. Pozisyon sensörü milin pozisyonunu kesin konumundan algılar ve bilgiyi kontrol devresine iletir. Kontrol devresi buna göre konum sensöründen gelen sinyalleri çözer ve motorların gerçek konumu ile istenen konumu karşılaştırır ve buna göre gerekli konumu elde etmek için DC motorun dönüş yönünü kontrol eder. Servo Motor genellikle 4,8 V ila 6 V DC besleme gerektirir.
Bir Servo Motorun Kontrol Edilmesi
Bir servo motor, Darbe Genişliği Modülasyon Tekniği kullanılarak konumu kontrol edilerek kontrol edilir. Motora uygulanan darbenin genişliği değişkendir ve sabit bir süre için gönderilir.
Darbe genişliği, servo motorun açısal konumunu belirler. Örneğin, 1 ms’lik bir darbe genişliği 0 derecelik bir açısal konuma neden olurken, 2 ms’lik bir darbe genişliği 180 derecelik bir açısal genişliğe neden olur.
Avantajlar:
- Motora ağır bir yük bindirilirse, sürücü motoru döndürmeye çalışırken motor bobinine giden akımı artıracaktır. Adım dışı olma durumu yoktur.
- Yüksek hızlı çalışma mümkündür.
Dezavantajları:
- Servo motor komut darbelerine göre dönmeye çalıştığı ancak gecikmeli olduğu için hassas dönüş kontrolü için uygun değildir.
- Daha yüksek maliyet.
- Durdurulduğunda, motorun rotoru bir darbe ileri geri hareket etmeye devam eder, bu nedenle titreşimi önlemeniz gerekiyorsa uygun değildir.
7 Tane Servo Motor Uygulaması
Servo motorlar, motor aşırı ısınmadan hızlı hız değişimleri gerektiren uygulamalarda kullanılır.
- Endüstrilerde takım tezgahlarında, paketlemede, fabrika otomasyonunda, malzeme taşımada, baskı dönüştürmede, montaj hatlarında ve diğer birçok zorlu uygulamada robotik, CNC makineleri veya otomatik imalatta kullanılırlar.
- Ayrıca, radyo kontrollü uçaklarda asansörlerin konumunu ve hareketini kontrol etmek için kullanılırlar.
- Düzgün açılıp kapanmaları ve doğru konumlandırmaları nedeniyle robotlarda kullanılırlar.
- Ayrıca havacılık endüstrisi tarafından hidrolik sistemlerinde hidrolik sıvıyı korumak için kullanılırlar.
- Birçok radyo kontrollü oyuncakta kullanılırlar.
- Disk tepsilerini genişletmek veya yeniden oynatmak için DVD’ler veya Blue-ray Disc oynatıcılar gibi elektronik cihazlarda kullanılırlar.
- Ayrıca araçların hızını korumak için otomobillerde kullanılıyorlar.
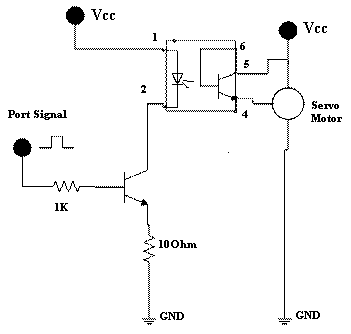
Servo Motor Uygulama Devresi
Aşağıdaki uygulama devresinden: Her motorun üç girişi vardır: VCC, toprak ve periyodik kare dalga sinyali. Kare dalganın darbe genişliği, servo motorların hızını ve yönünü belirler. Bizim durumumuzda, cihazın ileri, geri hareket etmesine ve sola ve sağa dönmesine izin vermek için yönü değiştirmemiz yeterli. Darbe genişliği belirli bir zaman diliminin altındaysa, motor saat yönünde hareket edecektir. Darbe genişliği bu zaman çerçevesini aşarsa, motor saat yönünün tersine hareket edecektir. Orta zaman çerçevesi, motorun içindeki yerleşik bir potansiyometre ile ayarlanabilir.
Servo Motor Devresi
Step Motor ve Servo Motor Arasındaki 3 Fark:
- Kademeli Motorlar çok sayıda kutba, kalıcı bir mıknatıs tarafından üretilen manyetik çiftlere veya bir elektrik akımına sahiptir. Servo motorların çok az kutbu vardır; her kutup, motor mili için doğal bir durma noktası sunar.
- Bir kademeli motorun düşük hızlardaki torku, aynı boyuttaki bir servo motordan daha büyüktür.
- Kademeli motor çalışması, darbe üretecinden çıkan komut darbe sinyalleri ile senkronize edilir. Tersine, servo motor çalışması komut darbelerinin gerisinde kalır.
Artık servo metrenin çalışması hakkında bir fikriniz var, bu konuyla ilgili herhangi bir sorunuz varsa veya elektrik ve elektronik projeleri aşağıdaki yorumlara yazabilirsiniz.
Benzer İçerikler




TREND İÇERİKLER

Lamba Çeşitleri ve Uygulamaları
1
Mayıs 17, 2023

Santrifüj Anahtar Nedir ve Çalışması
0
Mayıs 15, 2023

Şönt Kapasitör Nedir ve Çalışması
0
Mayıs 17, 2023

İzolatör Çeşitleri ve Uygulamaları
1
Mayıs 16, 2023
[…] Servo Motor – Çalışması, Avantajları ve Dezavantajları […]
[…] Servo Motor – Çalışması, Avantajları ve Dezavantajları […]
[…] Servo Motor – Çalışması, Avantajları ve Dezavantajları […]